FG1000


| Started in | 07/2017 |
|---|---|
| Description | G1000-based MFD emulation |
| Contributor(s) | Stuart, Richard (via Emesary), Michat (UI graphics), www2 (3D artwork) [1] |
| Status | Under active development |
| Folders | [GitLab]/flightgear/fgdata/next/Aircraft/Instruments-3d/FG1000/ |
| Changelog | [GitLab]/flightgear/fgdata/next/Aircraft/Instruments-3d/FG1000/ |
The FG1000 is a simulation of the Garmin G1000 glass panel flight deck. The FG1000 was developed in reference to the pilot's manual for the Cessna NAVIII variant, as fitted to the Cessna 182, but is designed to be flexible and also work with other airframes. For detailed instructions on how to use it, refer to the Garmin Pilot's Guide. Or read the Cheat's guide below.
Design
For an architecture diagram, see [GitLab]/flightgear/fgdata/next/Aircraft/Instruments-3d/FG1000/Architecture.svg.
The broad structure of the Nasal files in Aircaft/Instruments-3d/FG1000/Nasal is as follows:
- MFD.nas - top level MFD device, loads the other Nasal files (likely to be moved elsewhere later) and pages.
- PageGroupControllers.nas - controller for the Page Group display in the bottom right of the MFD, controlled by the FMS knob, and which allows selection between different page groups and individual pages.
- FG1000/FG1000.nas - MFD page, inheriting from the MFDPage.nas. Creates any required MapStructure and hierarchy of softkeys.
- FG1000/FG1000Controller.nas - Controller for the MFD page and the MapStructure layers, inheriting from MFDPageController.nas
- FG1000/FG1000Style.nas - Style controls for the MapStructure layers for the given Page.
- FG1000/FG1000Options.nas - Options for the MapStructure layers for the given Page.
Key design notes:
- Most of the underlying Canvas MapStructure layers are now written (though they require styling, and/or would benefit from replacement with vector data).
- Emesary IPC framework is used to link between the MFD and underlying simulation state. This should make it easy to run the MFD on a separate FG instance, and provides a good demarkation between the individual aircraft systems and the FG1000 itself.
- Various underlying UI classes are used to handle highlighting, selection and scrolling of fields. See Canvas MFD Framework for details of the elements now supported.
A Cheat's Guide to Using the FG1000
For those without the time or interest to read the G1000 User Guide, here's a very quick run-down on navigating through the MFD:
General:
- Click on the buttons, though some are not implemented yet.
- Use the mouse wheel to scroll the knobs (NAV, HDG, ALT, COM, CRS/BARO, RANGE, FMS). For knobs with both and inner and an outer (NAV, COM, CRS/BARO, FMS), scrolling when pressing the Shift key changes the outer knob.
- Use the outer FMS knob (shift-mouse wheel on the FMS knob on the bottom right) to navigate through the page groups.
- Use the inner FMS knob (mouse wheel on the FMS knob on the bottom right) to navigate through the pages within the group. The currently selected page is shown in blue. If you stop moving the cursor, the page will be loaded in 0.5s.
- Within a page, click on the FMS knob to activate the cursor (CRSR). You you should see some element highlighted on the page, typically flashing. You can navigate around the page using the outer and inner FMS knobs. The Outer FMS knob (shift-mouse wheel) typical moves the cursor between elements. The Inner FMS knob typically changes the selected item.
- Use the RANGE knob to zoom map views in/out.
PFD
- Artificial horizon, compass rose, altimeter and airspeed indicator are all hopefully obvious!
- HSI can display NAV1, NAV2, GPS information (press the CDI softkey)
- Wind information (press PFD->WIND then select one of the options for display)
- Bearings to NAV1, NAV2, GPS (press PFD then BRG1/BRG2 to cycle through the options)
- Inset Map (Press INSET softkey)
- Active Flight Plan (press FPL when there is an active flightplan to display)
- DirectTo GPS (press DTO)
- Transponder (press XPDR)
- NRST scrolls through information on the 10 nearest airports (press NRST)
MFD
- There is a two channel NAV/COM with an active and standby frequency and automatic ID of NAV frequencies at the top of the UI. They all integrate with the standard properties, so should work automatically with most aircraft.
- If you have a frequency highlighted in any of the pages (e.g. WPT - AIRPORT INFORMATION) press the ENT key to load it into the standby NAV/COM frequency as appropriate.
- To set up a GPS Direct To route:
- Press the DTO button (D with an arrow through it on the right side of the panel, below the word "PAN"). This will bring up a Direct To window, allowing you to enter the ID of an airport, Fix etc. to navigate to.
- You can enter the ID in one of three ways:
- Scroll the FMS knob backwards to bring up a sub-menu of waypoints categories (FPL, NRST, RECENT, USER, AIRWAY). Use the inner FMS knob to scroll between the different categories, and the outer FMS knob to select a specific item.
- Scroll the FMS knob forwards to enter an ID manually using the FMS knob. Use the outer FMS knob to move to the next poisition in the ID.
- Use multikey support to type in the ID using the keyboard - type ":ms" followed by the ID. This is by far the fastest method!
- Once you've got an ID, press ENT which will load details into the window and highlight the ACTIVATE button.
- Press ENT once more to load the Direct-to into the GPS and activate it.
- To view airport information, select the WPT - AIRPORT INFORMATION page. Use the outer FMS knob to move between the AIRPORT, RUNWAYS and FREQUENCY boxes, and the inner FMS to edit the airport ID, scroll through available runways, or highlight a frequency.
- To edit the current flightplan, press the FPL page, then press the CRSR and enter waypoints for DTO above.
GFC700 Autopilot
The GFC700 autopilot is a two axis autopilot with independent lateral and vertical modes. The default later/vertical modes are ROL and PIT, which hold the current roll and pitch respectively. If installed on the aircraft, the GFC700 autopilot is enabled by pressing any of the buttons on the bottom left of the PFD/MFD fascia:
- AP enables/disables autopilot
- FD enables a Flight Director mode, displaying control bars to follow manually. Note that this button is disabled when the autopilot is enabled.
- HDG enables a heading mode, tracking the blue heading bug. Use the HDG knob on the PFD to set.
- VS enables Vertical Speed hold. Current target is displayed at the top of the PFD. It may be adjusted by using NOSE UP / NOSE DN.
- ALT enables Altitude Hold, which holds the current altitude.
- GA enables Go Around, which sets ROL to 0 and PIT to 7 degrees nose up.
- NAV enables NAV mode. The navigation source depends on what the CDI is set to on the PFD. Currently this is only implemented for GPS.
- APR enables Approach mode for both vertical and lateral GPS or ILS approaches. Will use the currently selected CDI source.
- VNV enables vertical NAV mode (not yet implemented)
- FLC enables Flight Level Change, where the autopilot will maintain the current airspeed by pitch. NOSE UP / NOSE DN is used to set the target airspeed, which is displayed at the top of the PFD, and on the airspeed tape.
- BC enables Back Course mode (not yet implemented)
Buttons toggle modes on/off, defaulting to ROL for lateral and PIT for vertical. The current pitch setting in PIT mode can be adjusted by using the NOSE UP and NOSE DN buttons.
In PIT/VS/FLC mode, Selected Altitude Capture mode (ALTS) is armed, targetting the current altitude bug. Once the aircraft gets within 200ft of the selected altitude the autopilot will automatically transition to ALTS and then ALT mode to track that altitude. Note that once the altitude is fixed in ALTS mode changing the altitude bug will not change the target altitude.
(Control Wheel Steering (CWS) can be used to set new ROL/PIT targets, but is not yet implemented)
Multikey Support
To improve usability, the FG1000 also supports multikey. If installed on the aircraft (aircraft developers need to include Aircraft/Instruments-3d/FG1000/fg1000-multikey.xml), the following keys are available.
- ":p" controls the PFD
- 1- 12 selects the softkeys
- s allows you to use the keyboard to enter text directly into the PFD, e.g. when entering an airport
- ":m" controls the MFD
- 1-12 selects the softkeys
- a selects the Airport Information page
- c selects the Checklists page
- f selects the Flightplan page
- m selects the Navigation Map page
- n selects the Nearest Airports page
- s allows you to use the keyboard to enter text directly into the PFD, e.g. when entering an airport
- t selects the Traffic Map page
Aircraft Installation
Adding the FG1000 to an aircraft is intended to be fairly straightforward, but there is a little complexity due to properties that different aircraft use, and the Engine Information System (EIS) needing to be different for different powerplants. The J3Cub is a good example to use to see how the FG1000 integration can be done (the c182t isn't a good example as it uses the default FG1000 implementation).
Add the GDU to the cockpit
Place one or more of the display (GDU) units in your model. The XML files are in GDU104X directory and are named <model>.<device-number>.xml, e.g.
GDU-1045.1.xml GDU-1045.2.xml GDU-1045.3.xml GDU-1045.4.xml
The <device-number> is referenced later to identify which displays to used for each PFD, MFD etc. You must only used one of each <device-number> value, though you can mix and match the GDU models.
The different GDU models are as follows:
- GDU-1040 - No autopilot controls
- GDU-1044B - autopilot controls without VNAV
- GDU-1045 - autopilot controls with VNAV
Include the GFC700 autopilot (optional)
If using the 1044B or 1045 GDU, the GFC700 autopilot can be incorporated by adding the following to under /sim/systems
<autopilot>
<path>Aircraft/Instruments-3d/FG1000/GFC700.xml</path>
</autopilot>
The autopilot has been tuned for the Cessna 182, so may not be correct for light jets.
Load the Interfaces to provide data
This is used to provide airdata, navdata, NAV/COM settings, engine information to the GDUs. There is a generic interface (GenericInterfaceController) that uses the standard FG route manager, GPS, navigation data and NAV/COM settings, and engine data for a single piston engine.
You need to load it as follows:
var nasal_dir = getprop("/sim/fg-root") ~ "/Aircraft/Instruments-3d/FG1000/Nasal/";
io.load_nasal(nasal_dir ~ 'Interfaces/GenericInterfaceController.nas', "fg1000");
var interfaceController = fg1000.GenericInterfaceController.getOrCreateInstance();
interfaceController.start();You may want to create your own version depending on what properties you are using for the NAV/COM, and your engine configuration. In which case you should copy /Aircraft/Instruments-3d/FG1000/Nasal/Interfaces/GenericInterfaceController.nas into your aircraft Nasal directory, edit it to load any updated interfaces and load it instead:
var aircraft_dir = getprop("/sim/aircraft-dir");
io.load_nasal(aircraft_dir ~ '/Nasal/GenericInterfaceController.nas', "fg1000");
var interfaceController = fg1000.GenericInterfaceController.getOrCreateInstance();
interfaceController.start();Note that you should only start the interface after you've started the FG1000 as they will publish information at start of day that the displays need.
Create an EIS Display
This is the Engine Information System and displays on the left side of the MFD.
A simply EIS for the Cessna 182T is provided. For other aircraft you will need to create your own. The simplest way to do this is
- Copy Aircraft/Instruments-3d/FG1000/EIS into your aircraft Nasal directory. Re-name EIS-c182t.nas to something sensible (e.g. EIS-[aircraft].nas). Don't forget to rename the class itself!
- Copy one of the EIS .svg files from Aircraft/Instruments-3d/FG1000/MFDPages into your aircraft Nasal. Modify it as required, noting the names of objects and how they map to the EIS.nas file.
- Edit the SVG and EIS-[aircraft].nas as appropriate. In particular note that the Fuel submenu is used to set the contents of the fuel tanks manually, with a fuel totalizer approach.
- Copy Aircraft/Instruments-3d/FG1000/Nasal/Interfaces/GenericEISPublisher.nas into your Nasal directory, and rename it (e.g. [aircraft]EISPublisher.nas. Don't forget to rename the class itself! Modify it to publish the correct set of properties to Emesary. Note that for multiple engine aircraft you need to modify the publish() method.
- As noted above, you will need to load a modified version of GenericInterfaceController.nas
- Finally, modify whatever Nasal you use to load the FG1000 to pass in the new EIS class and SVG file. Note that you need to load the EIS Controller, style and Options classes as well.
This is what your Nasal file may look like at the end:
# Load a customer Interface controller
var aircraft_dir = getprop("/sim/aircraft-dir");
io.load_nasal(aircraft_dir ~ '/Nasal/GenericInterfaceController.nas', "fg1000");
var interfaceController = fg1000.GenericInterfaceController.getOrCreateInstance();
interfaceController.start();
io.load_nasal(aircraft_dir ~ '/Nasal/EIS/EIS-J3Cub.nas', "fg1000");
io.load_nasal(aircraft_dir ~ '/Nasal/EIS/EISController.nas', "fg1000");
io.load_nasal(aircraft_dir ~ '/Nasal/EIS/EISStyles.nas', "fg1000");
io.load_nasal(aircraft_dir ~ '/Nasal/EIS/EISOptions.nas', "fg1000");
# This is the class in EIS-J3Cub.nas, loaded above.
var EIS_Class = fg1000.EISJ3Cub;
# Create the FG1000 using custom EIS Class, and the appropriate .svg file.
var fg1000system = fg1000.FG1000.getOrCreateInstance(EIS_Class:EIS_Class, EIS_SVG: "Nasal/EIS/EIS-J3Cub.svg");Using custom SVG files
To assist in implementing related glass cockpits (e.g. Garmin Perspective on the Cirrus SR22T), you can specify a directory to be used instead of /Aircraft/Instruments-3d/FG1000/MFDPages/ for the SVG files used by the MFD. Note that you must copy across all the .svg files.
# Create the FG1000 using custom EIS Class, and the appropriate .svg file, and a custom path to other SVG files
var fg1000system = fg1000.FG1000.getOrCreateInstance(EIS_Class:EIS_Class, EIS_SVG: "Nasal/EIS/EIS-J3Cub.svg", SVG_Path: "MFDPages/");
Airspeed flags (Vx, Vy, Vr, Vglide, Vne)
You can set the value and visibility of various V-speeds shown on the airspeed tape. The values are stored in the ConfigStore of fg1000 and properties that you set.
To set them, simply call the "set()" method in your Nasal file with the appropriate value. For example:
fg1000system.getConfigStore().set("Vx", 45);
fg1000system.getConfigStore().set("Vy", 43);
fg1000system.getConfigStore().set("Vglide-visible", 0);The flags available are as follows
- Vx
- Vy
- Vr
- Vglide
- Vne
Each flag has a "-visible" property which is used to indicate whether the value should be shown at all. In the above example code the "Vglide" flag will not be shown.
Add multikey support
Include Aircraft/Instruments-3d/FG1000/fg1000-multikey.xml in your -set.xml file to support multikey.
<input>
<keyboard n="0">
<multikey include="Aircraft/Instruments-3d/FG1000/fg1000-multikey.xml"/>
</keyboard>
<input>
See Howto:Add_multi-key_commands_to_an_aircraft for further details.
Load and start the FG1000 system
A simple FG1000 using the generic EIS, and displaying PFD on device-number 1 and an MFD on device-number 2 is as follows:
var nasal_dir = getprop("/sim/fg-root") ~ "/Aircraft/Instruments-3d/FG1000/Nasal/";
io.load_nasal(nasal_dir ~ 'FG1000.nas', "fg1000");
# Create the FG1000
var fg1000system = fg1000.FG1000.getOrCreateInstance();
# Create a PFD as device 1, MFD as device 2
fg1000system.addPFD(index:1);
fg1000system.addMFD(index:2);
# Map the devices to placement objects Screen{i}, in this case Screen1 and Screen2
fg1000system.display(index:1);
fg1000system.display(index:2);
# Show the devices
fg1000system.show(index:1);
fg1000system.show(index:2);
# Display a GUI version of device 1 at 50% scale.
#fg1000system.displayGUI(index:1, scale:0.5);You may also want to add some listeners to show/hide the FG1000 depending on electrical power, and also control the bezel backlighting:
# Switch the FG1000 on/off depending on power.
setlistener("/systems/electrical/outputs/fg1000", func(n) {
if (n.getValue() > 0) {
fg1000system.show();
setprop("/instrumentation/FG1000/Lightmap", getprop("/controls/lighting/avionics-lights-norm"));
} else {
fg1000system.hide();
setprop("/instrumentation/FG1000/Lightmap", 0.0);
}
}, 0, 0);
# Control the backlighting of the bezel based on the avionics light knob
setlistener("/controls/lighting/avionics-lights-norm", func(n) {
if (getprop("/systems/electrical/outputs/fg1000") > 5.0) {
setprop("/instrumentation/FG1000/Lightmap", n.getValue());
} else {
setprop("/instrumentation/FG1000/Lightmap", 0.0);
}
}, 0, 0);Route Manager
That's exactly the kind of device James hopes the new code can support. He's read the G1000 pilot's manual, and *thinks* that nearly all the functions can be provided by the current GPS code It would be great if people could look over the current GPS features and indicate any pieces you think might be missing - additional commands, additional search features, extra data, or anything really. [2]
tile servers
Please keep in mind that most tile servers discourage bulk downloads. For the whole planet,oomlevel 8 is approx. 67k files, at zoomlevel 9 you have 265k, level 10 has a little over one million tiles. And one would probably want to go up to level 15 (roughly 1e9 files)[3]
Offline mode
Would it be possible to provide an offline tool to pre-fetch a region, like TerraMaster, or terrasync.py? Call me old-fashioned or paranoid, but I don't want FG to go online and do stuff automatically, I prefer downloading what I need manually so that I know what gets onto my harddisk. Also - think of all the people with poor home internet which might have larger bandwidth only in a library elsewhere.[4]
that would certainly be possible - the code retrieving the data is pretty trivial and porting the Nasal code to python or some other script should be straightforward.[5]
we need some better data sources, especially with direct routing replacing airways in many areas, and having airspace data would help the map displays, but the current API is specifically designed to support G430, G1000 and similar class devices. Adding RNAV approaches is eminently doable, see the the RNavController base class which the GPS/FMS layer uses to allow new waypoint / route segments to define how they are flown and drive CDIs [6]
Getting the algorithms right, and keeping the data up to date every 7 weeks (we have only a tiny sliver of that data currently), is going to be much more of a challenge. I expect that it's probably an order of magnitude more complicated than our current flight dynamics (etc.), so we'd have to grow our contributor base, and find funding to pay at least Curt (and maybe a couple of others) full time to manage the project. Note that that's what has happened for other complex FOSS projects, like office suites and browsers, which generally end up working through a foundation, rather than our current relaxed circle-of-friends arrangement. The reason it's so much harder now is that the software *is* the product for GPS navigators, FMSs, etc. (unlike with older avionics, where the hardware was the main thing). That means that emulating even a simple unit like the GTN 650 or GNS 430W is almost difficult as building one, so we're trying to keep up with armies of full-time software developers at Garmin, Avidyne, etc.[7]
According to the Route Manager wiki page, we already have support for SID/STAR data provided from Navigraph, which is released on the AIRAC cycle, and costs a pretty small amount (9 EUR for a single download of FMS data, or 90 EUR per year) Given the relatively low cost, I don't think that we as an organiation want to get into trying to digitize data ourselves just to make it open-source or public domain. Particularly given the low cost of a download. We might want to digitize the STAR/SIDs for the default airport with each release so there are some approaches available for those who don't want to purchase the data.[8]
everyone agrees we would like to add airspace data - what we’re missing is a suitable data source with the correct license. Torsten found a raster-based source but for wider use in the sim we really need vector data, so we can render it ourselves directly. [9]
For airspace data we could use https://openflightmaps.org/ . It provides community created navigation data for many countries in (currently only) Europe with a free license.[10]
we definitely want vector data. Stuart is hoping that we might convince the source of the raster data we're using at present to provide it as raw vector data, but we haven't had any luck so far.[11]
Airport Data (US - only )
At least for the US, all required information is available in the form of regularly updated UDFF files:
- https://www.ngs.noaa.gov/AERO/aero.html
- https://www.ngs.noaa.gov/AERO/uddf/WESTERN-PACIFIC/CALIFORNIA/SFO__03B.F77
- https://www.ngs.noaa.gov/AERO/annof_7.pdf
It would seem relatively straightforward to provide a scripted parser to create the corresponding charts procedurally. As a matter of fact, this could even be done in a background thread or using a separate Python script, i.e. if we wanted to ship pre-created imagery as part of fgdata.
However, if the built-in Canvas system is extended to provide these charts, Phi could also be entirely self-contained by rendering the same airport charts without having to depend on external data sources.
Layers
Following is the list of layers displayed by the G1000 system (see page 153 of the 190-00498-07 Rev. A), and mapping to the equivalent MapStructure Layer. Many of these would also be good to have for other avionics/GUI dialogs, including the NavDisplay framework, which is currently re-implementing this functionality separately, i.e. not yet using MapStructure.
Following is the list of layers displayed by the G1000 system, based on the Garmin G1000 Integrated Flight Deck Pilot's Guide for the Cessna Nav III,[12] page 153, and the mapping to the equivalent MapStructure Layer.
Richard mentioned that if he were to implement approach plates in the EFB he'd probably use raster images provided via http and provide an http service within FG to do this, or to allow the EFB to use any other external web service. Other content for the EFB could be also provided as SVG via http.[13]
| Layer | MapStructure Layer | Type | Status | Page in [12] | Notes |
|---|---|---|---|---|---|
| Flight Plan Route Lines | RTE | offline | Requires styling | 190 | |
| Flight Plan Route Waypoints | WPT | offline | Requires styling | 190 | |
| Rivers/Lakes | VFRChart | online | 148 | Currently using downloaded raster from web. Perhaps generate similarly to Atlas[14], or could be vector data from scenery. Tom originally suggested to directly render an orthographic view of the scenery/terrain to the canvas, thus the atlas-based approach should also work using a custom Canvas View Camera Element, based on the Hackathon Proposal: CompositeViewer and Canvas experiments (see the ideas summarized at Canvas Tile Element). Fernando agreed already that it would be straightforward to apply custom node masks, LOD ranges and even effect schemes per Compositor instance. | |
| Topography Data | VFRChart | online | Synthetic | 145 | Height-map at chart-resolution. Perhaps generate similarly to Atlas? Tom originally suggested to directly render an orthographic view of the scenery/terrain to the canvas, thus the atlas-based approach should also work using a custom Canvas View Camera Element, based on the Hackathon Proposal: CompositeViewer and Canvas experiments (see the ideas summarized at Canvas Tile Element). Fernando agreed already that it would be straightforward to apply custom node masks, LOD ranges and even effect schemes per Compositor instance. |
| International Borders | 148 | Vector data from scenery? | |||
| Track Vector | 156 | Forward looking display of track. Look-ahead time selectable. | |||
| Navigation Range Ring | offline | 159 | Straightforward extension of APS. | ||
| Fuel Range Ring | offline | 159 | Straightforward extension of APS. | ||
| Terrain Data | - | 364 | Should be straightforward, with exception of obstacles. Profile view also required. | ||
| Traffic | TFC | offline | 394, 423 | Various options, each with different iconography and data displayed. | |
| Airways | VFRChart | online | 154 | Needs to be replaced with vector data | |
| NEXRAD | unknown | 282 | Heaps of weather data with complex symbology. | ||
| XM Lightning Data | WXR | offline | Change to symbol for lightning? | 294 | Optional |
| Airports | APT, RWY | offline | Require re-style based on size | 149, 163 | |
| Runway Labels | RWY | offline | 148 | Needs to be added to RWY. Should be straightforward | |
| Restricted | OpenAIP | online | 182 | Currently using downloaded rasters. Would be better replaced with vector data, see original plans at Canvas_Maps#Vector_data. We do already have a SHP parser, that’s how the launcher loads the SHP data used in the launcher map: but loading for display is much easier than a robust ‘is point inside an arbitrary complex polygon’ tester.[15]
Using GDAL/CGAL for other features has been repeatedly discussed on the devel list, i.e. for WS 3.0 to create the meta-texture at runtime from the vector data - i.e use CGAL + GDAL to ‘paint’ the vector data into textures as they are needed. This means the resolution of the meta-texture tiles can be adaptive, which gives a trivia solution to handling roads and similar - draw them into the meta texture (or an additional one) adaptively based on distance from viewer, etc.[16] CGAL/GDAL are not so problematic to consider shipping. (They are well maintained, well supported on Windows, and have sane build systems). We would want some warning and time to handle it, but should definitely not consider this particular point to be a blocker for more advanced runtime features. [17] | |
| MOA (Military) | OpenAIP | online | 182 | Currently using downloaded rasters. Would be better replaced with vector data, see original plans at Canvas_Maps#Vector_data. We do already have a SHP parser, that’s how the launcher loads the SHP data used in the launcher map: but loading for display is much easier than a robust ‘is point inside an arbitrary complex polygon’ tester.[18]
Using GDAL/CGAL for other features has been repeatedly discussed on the devel list, i.e. for WS 3.0 to create the meta-texture at runtime from the vector data - i.e use CGAL + GDAL to ‘paint’ the vector data into textures as they are needed. This means the resolution of the meta-texture tiles can be adaptive, which gives a trivia solution to handling roads and similar - draw them into the meta texture (or an additional one) adaptively based on distance from viewer, etc.[19] CGAL/GDAL are not so problematic to consider shipping. (They are well maintained, well supported on Windows, and have sane build systems). We would want some warning and time to handle it, but should definitely not consider this particular point to be a blocker for more advanced runtime features. [20] | |
| User Waypoints | offline | ||||
| Latitude/Longitude Grid | GRID | offline | |||
| NAVAIDs | APT, VOR, FIX, NDB | offline | APT, requires styling | 162 | |
| Class B Airspaces/TMA | OpenAIP | online | 182 | Currently using downloaded rasters. Would be better replaced with vector data, see original plans at Canvas_Maps#Vector_data. We do already have a SHP parser, that’s how the launcher loads the SHP data used in the launcher map: but loading for display is much easier than a robust ‘is point inside an arbitrary complex polygon’ tester.[21]
Using GDAL/CGAL for other features has been repeatedly discussed on the devel list, i.e. for WS 3.0 to create the meta-texture at runtime from the vector data - i.e use CGAL + GDAL to ‘paint’ the vector data into textures as they are needed. This means the resolution of the meta-texture tiles can be adaptive, which gives a trivia solution to handling roads and similar - draw them into the meta texture (or an additional one) adaptively based on distance from viewer, etc.[22] CGAL/GDAL are not so problematic to consider shipping. (They are well maintained, well supported on Windows, and have sane build systems). We would want some warning and time to handle it, but should definitely not consider this particular point to be a blocker for more advanced runtime features. [23] | |
| Class C Airspaces/TCA | OpenAIP | online | 182 | Currently using downloaded rasters. Would be better replaced with vector data, see original plans at Canvas_Maps#Vector_data. We do already have a SHP parser, that’s how the launcher loads the SHP data used in the launcher map: but loading for display is much easier than a robust ‘is point inside an arbitrary complex polygon’ tester.[24]
Using GDAL/CGAL for other features has been repeatedly discussed on the devel list, i.e. for WS 3.0 to create the meta-texture at runtime from the vector data - i.e use CGAL + GDAL to ‘paint’ the vector data into textures as they are needed. This means the resolution of the meta-texture tiles can be adaptive, which gives a trivia solution to handling roads and similar - draw them into the meta texture (or an additional one) adaptively based on distance from viewer, etc.[25] CGAL/GDAL are not so problematic to consider shipping. (They are well maintained, well supported on Windows, and have sane build systems). We would want some warning and time to handle it, but should definitely not consider this particular point to be a blocker for more advanced runtime features. [26] | |
| Class D Airspaces | OpenAIP | online | 182 | Currently using downloaded rasters. Would be better replaced with vector data, see original plans at Canvas_Maps#Vector_data. We do already have a SHP parser, that’s how the launcher loads the SHP data used in the launcher map: but loading for display is much easier than a robust ‘is point inside an arbitrary complex polygon’ tester.[27]
Using GDAL/CGAL for other features has been repeatedly discussed on the devel list, i.e. for WS 3.0 to create the meta-texture at runtime from the vector data - i.e use CGAL + GDAL to ‘paint’ the vector data into textures as they are needed. This means the resolution of the meta-texture tiles can be adaptive, which gives a trivia solution to handling roads and similar - draw them into the meta texture (or an additional one) adaptively based on distance from viewer, etc.[28] CGAL/GDAL are not so problematic to consider shipping. (They are well maintained, well supported on Windows, and have sane build systems). We would want some warning and time to handle it, but should definitely not consider this particular point to be a blocker for more advanced runtime features. [29] | |
| Other Airspaces/ADIZ | OpenAIP | online | 182 | Currently using downloaded rasters. Would be better replaced with vector data, see original plans at Canvas_Maps#Vector_data. We do already have a SHP parser, that’s how the launcher loads the SHP data used in the launcher map: but loading for display is much easier than a robust ‘is point inside an arbitrary complex polygon’ tester.[30]
Using GDAL/CGAL for other features has been repeatedly discussed on the devel list, i.e. for WS 3.0 to create the meta-texture at runtime from the vector data - i.e use CGAL + GDAL to ‘paint’ the vector data into textures as they are needed. This means the resolution of the meta-texture tiles can be adaptive, which gives a trivia solution to handling roads and similar - draw them into the meta texture (or an additional one) adaptively based on distance from viewer, etc.[31] CGAL/GDAL are not so problematic to consider shipping. (They are well maintained, well supported on Windows, and have sane build systems). We would want some warning and time to handle it, but should definitely not consider this particular point to be a blocker for more advanced runtime features. [32] | |
| TFRs | unknown | 310 | |||
| Obstacles | OpenAIP | online | 182 | Currently using downloaded rasters. Would be better replaced with vector data, see original plans at Canvas_Maps#Vector_data. We do already have a SHP parser, that’s how the launcher loads the SHP data used in the launcher map: but loading for display is much easier than a robust ‘is point inside an arbitrary complex polygon’ tester.[33]
Using GDAL/CGAL for other features has been repeatedly discussed on the devel list, i.e. for WS 3.0 to create the meta-texture at runtime from the vector data - i.e use CGAL + GDAL to ‘paint’ the vector data into textures as they are needed. This means the resolution of the meta-texture tiles can be adaptive, which gives a trivia solution to handling roads and similar - draw them into the meta texture (or an additional one) adaptively based on distance from viewer, etc.[34] CGAL/GDAL are not so problematic to consider shipping. (They are well maintained, well supported on Windows, and have sane build systems). We would want some warning and time to handle it, but should definitely not consider this particular point to be a blocker for more advanced runtime features. [35] | |
| Land/Country Text | online | 148 | Currently using raster data from web. Replace with POI? | ||
| Cities | VFRChart | online | 148 | Currently using raster data from web. Perhaps generate similarly to Atlas, or could be vector data from scenery. Tom originally suggested to directly render an orthographic view of the scenery/terrain to the canvas, thus the atlas-based approach should also work using a custom Canvas View Camera Element, based on the Hackathon Proposal: CompositeViewer and Canvas experiments (see the ideas summarized at Canvas Tile Element). Fernando agreed already that it would be straightforward to apply custom node masks, LOD ranges and even effect schemes per Compositor instance. https://forum.flightgear.org/viewtopic.php?p=364643#p364643 | |
| Roads | VFRChart | online | 148 | Currently using raster data from web. Requires vector data from scenery | |
| Railroads | VFRChart | online | 148 | Currently using raster data from web. Requires vector data from scenery | |
| State/Province Boundaries | VFRChart | online | 148 | Currently using raster data from web. Requires vector data from scenery | |
| River/Lake Names | VFRChart | online | 148 | Currently using raster data from web. Replace with POI? | |
| Selected Altitude Intercept Arc | offline | 161 | Simple extention to APS | ||
| SafeTaxi (Optional) | RWY, TAXI | offline | 493 | We don't currently have the data to display taxiway identifier or holding points | |
| ChartView (Optional) | offline | 503 | Rendering of PDFs. Might be possible to integrate with NaviGraph chart data? | ||
| FliteChart (Optional) | offline | 521 | Rendering of PDFs. Might be possible to integrate with NaviGraph chart data? |
Existing work
Avionics / Cockpits
- zkv1000 see https://forum.flightgear.org/viewtopic.php?t=32056
- Extra500 / Avidyne Entegra R9000
Nasal / Canvas
- Canvas MFD Framework
- MapStructure
- MapStructure Layers
- Howto:Creating a Canvas GUI Widget
- Emesary
C++
- Atlas map creation
- Synthetic Vision element for rendering viewmgr views to a Canvas
- Canvas PDF element - for rendering PDF files (think EFB functionality)
Development
For the background, development status and challenges, see FG1000/development.
Resources
Gallery

FG1000 PFD showing inset map, current wind data, HSI with GPS bearing, active flightplan list

FG1000 MFD with Cessna 182T Engine Information System (EIS), and Active Flightplan
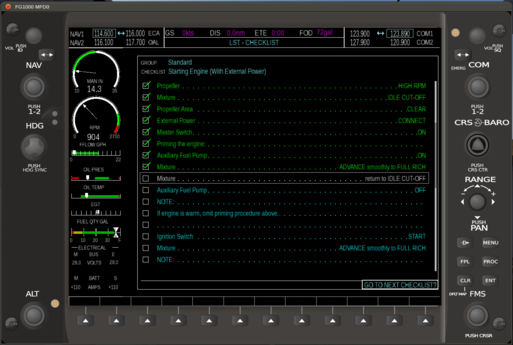
FG1000 MFD with Checklist page displayed



![[GitLab]/flightgear/fgdata/next/Aircraft/Instruments-3d/FG1000/Architecture.svg](https://gitlab.com/flightgear/fgdata/blob/next/Aircraft/Instruments-3d/FG1000/Architecture.svg){kind=link}
Related content
Commits
This section is intended to help keep track of related fgdata commits, so that if/when the project should stall, people can more easily look up related changes.
- Initial Direct To page(01/2018)
- Add Config Store and MFD Header display.(01/2018)
- SVG MFD UI from miChat(01/2018)
- Use Emesary interface rather than airportinfo()(01/2018)
- Set standby COM frequency from Airport pages(01/2018)
- NAV/COM Radio support(01/2018)
- Add full set of hardkeys to fg1000 PUI dialog.(01/2018)
- extend MFDPageController to handle Emesary register(01/2018)
- Update NAV/COMM frequencies from properties(01/2018)
- Modify FG1000 EIS to use Emesary(01/2018)
- FG1000 Nearest Airports page(01/2018)
- PFD UI Elements and NearestAirports page (12/2017)
- Add AirportInfo and template pages for FG1000 (12/2017)
- Initial commit of FG1000 MFD (11/2017)
MapStructure related:
- GRID layer (10/2017)
- RWY, TAXI, TWR, PARKING (10/2017)
- STAMEN (10/2017)
- VFRChart (09/2017)
- OSM and OpenAIP (09/2017)