Howto:Implement a Vertical Situation Display in Nasal
Jump to navigation
Jump to search
| This article or section contains out-of-date information
Please help improve this article by updating it. There may be additional information on the talk page. |

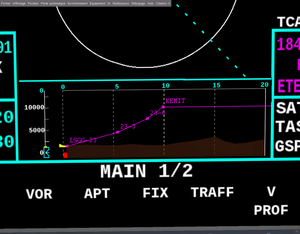
clm76 adapted the Omega95's VSD to the CitationX :[1]
- Last updated: 10/2017
- Contributors: clm76, Omega95
Objective
Implement a VSD (Vertical Situation Display) instrument using the Canvas and Nasal.
Omega95 once created a Canvas VSD, my suggestion would be to search the forum/wiki for details:

clm76 adapted Omega95's original Canvas VSD to the CitationX[3]
#### Citation X - Vertical Situation Display ####
#### Narendran M (c) 2014
#### Adapted by C. Le Moigne (clm76) - 2017 ####
props.globals.initNode("instrumentation/efis/inputs/vsd",0,"BOOL");
var alt = 0;
var alt_ind = "/instrumentation/altimeter/indicated-altitude-ft";
var asel = "/autopilot/settings/asel";
var curWpt = "/autopilot/route-manager/current-wp";
var dep_alt = "/autopilot/route-manager/departure/field-elevation-ft";
var dest_alt = "/autopilot/route-manager/destination/field-elevation-ft";
var dist_rem = "autopilot/route-manager/distance-remaining-nm";
var fp_active = "/autopilot/route-manager/active";
var heading_ind = "/instrumentation/heading-indicator/indicated-heading-deg";
var num_wpts = "/autopilot/route-manager/route/num";
var set_range = "/instrumentation/efis//inputs/range-nm";
var svg_path = "/Aircraft/CitationX/Models/Instruments/MFD/canvas/Images/vsd.svg";
var tg_alt = "autopilot/settings/tg-alt-ft";
var toggle_vsd = "/instrumentation/efis//inputs/vsd";
var totDist = "autopilot/route-manager/total-distance";
var vert_spd = "/velocities/vertical-speed-fps";
var rangeHdg = [];
var brk_next = nil;
var color = nil;
var text = nil;
var pos = nil;
var check_hdg = nil;
var elev = nil;
var vs_fps = nil;
var gs_fps = nil;
var fpa = nil;
var info = nil;
var elevation = nil;
#### VSD CLASS ###
var vsd = {
terrain_color: [0.44, 0.19, 0.09, 0.5], # A brownish color
path_color: [1,0,1,1], # Magenta
cstr_color: [0,1,0,1], # Green
tod_color : [1,1,0,1], # Yellow
elev_pts: 21, # Number of elevation data points
elev_profile: [],
range: 20,
lastalt:0,
lastaltset:0,
alt_ceil: 10000,
altitude: 0,
peak: 0,
alt_ceil_px: 180, # Pixel length of vertical axis
max_range_px: 810, # Pixel length of horizontal axis
terr_offset: 22, # Offset between start of terrain polygon y and bottom_left corner
bottom_left: {x:190, y:294}, # {x:x,y:y_max - y} of bottom-left corner of plot area - looks like canvas starts it's y axis from the top going down - old 233,294
new: func() {
var m = {parents:[vsd]};
m.display = canvas.new({
"name": "vsdScreen",
"size": [1024, 320],
"view": [1024, 320],
"mipmapping": 1
});
m.display.addPlacement({"node": "Vsd.screen"});
### Create canvas group
m.group = m.display.createGroup(); # Group for canvas elements and paths
m.text = m.display.createGroup(); # Group for waypoints text
m.terrain = m.group.createChild("path"); # Terrain Polygon
m.path = m.group.createChild("path"); # Flightplan Path
### Load Vertical Situation Display
canvas.parsesvg(m.group, svg_path);
setsize(m.elev_profile,m.elev_pts);
### Create empty geo.Coord object for waypoints calculation
m.wpt_this = geo.Coord.new();
m.wpt_next = geo.Coord.new();
m.wpt_tod = geo.Coord.new();
### Display init ###
m.h_range = getprop(set_range);
m.group.getElementById("text_range1").setText(sprintf("%3.0f",m.h_range*0.25));
m.group.getElementById("text_range2").setText(sprintf("%3.0f",m.h_range*0.5));
m.group.getElementById("text_range3").setText(sprintf("%3.0f",m.h_range*0.75));
m.group.getElementById("text_range4").setText(sprintf("%3.0f",m.h_range));
m.group.getElementById("tgt_altitude").setText(sprintf("%5.0f",getprop(tg_alt)));
### Variables ###
m.fp = flightplan();
m.alt_set = getprop(tg_alt);
m.lastWp = 0;
m.lastWp_alt = 0;
m.lastWp_dist = 0;
m.prevWp_alt = 0;
m.prevWp_dist = 0;
m.v_alt = nil;
return m;
}, # end of new
### Listeners ###
listen : func {
setlistener(fp_active, func(n) {
if (n.getValue()) {
me.fp = flightplan();
me.tot_dist = getprop(totDist);
me.update();
me.v_alt = fms.vsd_alt(); # Call altitudes vector from fms
}
},0,0);
setlistener(set_range, func(n) {
me.range = n.getValue();
if(me.range > 10) {
me.group.getElementById("text_range1").setText(sprintf("%3.0f",me.range*0.25));
me.group.getElementById("text_range2").setText(sprintf("%3.0f",me.range*0.5));
me.group.getElementById("text_range3").setText(sprintf("%3.0f",me.range*0.75));
me.group.getElementById("text_range4").setText(sprintf("%3.0f",me.range));
} else {
me.group.getElementById("text_range1").setText(sprintf("%1.1f",me.range*0.25));
me.group.getElementById("text_range2").setText(sprintf("%1.0f",me.range*0.5));
me.group.getElementById("text_range3").setText(sprintf("%1.1f",me.range*0.75));
me.group.getElementById("text_range4").setText(sprintf("%1.0f",me.range));
}
},0,0);
setlistener(tg_alt, func(n) {
me.alt_set = n.getValue();
me.group.getElementById("tgt_altitude").setText(sprintf("%5.0f",me.alt_set));
me.newSetPos = -me.alt_ceil_px*(me.alt_set/me.alt_ceil);
me.group.getElementById("altitude_set").setTranslation(0,me.newSetPos-me.lastaltset);
me.lastaltset = me.newSetPos;
},0,0);
}, # end of listen
update: func {
if(getprop(toggle_vsd) == 1) {
# Generate elevation profile
me.altitude = getprop(alt_ind);
if(me.altitude == nil) {
me.altitude = 0;
}
me.alt_ceil = (getprop(asel)*100 == 0 ? 1 :getprop(asel)*100);
me.new_markerPos = -me.alt_ceil_px*(me.altitude/me.alt_ceil);
# Vertical Flight Path
me.numWpts = me.fp.getPlanSize();
me.currWpt = me.fp.current;
if (me.numWpts > 1 and me.currWpt >= 0) {
me.path.del();
me.text.removeAllChildren();
me.path = me.group.createChild("path");
me.path.setColor(me.path_color)
.moveTo(me.bottom_left.x,me.bottom_left.y-4+me.new_markerPos)
.setStrokeLineWidth(2)
.show();
me.wpt_this.set_latlon(me.fp.getWP(me.currWpt).lat, me.fp.getWP(me.currWpt).lon);
me.rteLen = geo.aircraft_position().distance_to(me.wpt_this)*M2NM;
brk_next = 0;
# Calculate distance between waypoints
for(var i=me.currWpt; i<me.numWpts; i=i+1) {
if (i == 0) {alt = getprop(dep_alt)}
else if (i == me.numWpts-1) {alt = getprop(dest_alt)}
else {
if (me.v_alt != nil) { # plan not activated
#### BASIC ###
if(me.fp.getWP(i).wp_type == "basic" and me.fp.getWP(i).wp_role == nil) {
### SIDS ###
if (me.fp.getWP(i).distance_along_route < me.tot_dist/2) {
if (me.v_alt.vector[i] <= 0) {
alt = getprop(asel)*100;
} else {
alt = me.v_alt.vector[i];
}
} else {
### STARS ###
alt = me.v_alt.vector[i];
}
} else {
### NAVAIDS ###
alt = me.v_alt.vector[i];
}
}
}
if(me.rteLen > me.range) {brk_next = 1}
me.path.lineTo(me.bottom_left.x + me.max_range_px*(me.rteLen/me.range), me.bottom_left.y - me.alt_ceil_px*(alt/me.alt_ceil));
# Add waypoint ident
if (me.fp.getWP(i).wp_name == 'TOD') {
color = me.tod_color;
text = "TOD";
} else {
color = me.path_color;
text = me.fp.getWP(i).id;
}
me.text.createChild("text")
.setAlignment("left-bottom")
.setColor(color)
.setFontSize(24,1.0)
.setTranslation(me.bottom_left.x + 10 + me.max_range_px*(me.rteLen/me.range), me.bottom_left.y - 10 - me.alt_ceil_px*(alt/me.alt_ceil))
.setText(text);
me.text.createChild("text")
.setAlignment("center-center")
.setColor(color)
.setFontSize(28,1.2)
.setTranslation(me.bottom_left.x + me.max_range_px*(me.rteLen/me.range), me.bottom_left.y - me.alt_ceil_px*(alt/me.alt_ceil))
.setText("*");
if(i<me.numWpts-1) {
me.wpt_this.set_latlon(me.fp.getWP(i).lat, me.fp.getWP(i).lon);
me.wpt_next.set_latlon(me.fp.getWP(i+1).lat, me.fp.getWP(i+1).lon);
append(rangeHdg, {range: me.rteLen, course: me.wpt_this.course_to(me.wpt_next)});
me.rteLen = me.rteLen + me.wpt_this.distance_to(me.wpt_next)*M2NM;
}
if(brk_next == 1) {break}
}
} else {
me.path.hide();
me.text.removeAllChildren();
}
pos = geo.aircraft_position();
# Get terrain profile along the flightplan route if WPT is enabled. If WPT is not enabled, the rangeHdg vector should be empty, so it's just going to get the elevation profile along the indicated aircraft heading
me.peak = 0;
forindex(var j; me.elev_profile) {
check_hdg = getprop(heading_ind);
foreach(var wpt; rangeHdg) {
if(j*(me.range/me.elev_pts) > wpt.range) {
check_hdg = wpt.course;
} else {break}
}
pos.apply_course_distance(check_hdg,(me.range/me.elev_pts)*NM2M);
elev = me.get_elevation(pos.lat(), pos.lon());
me.elev_profile[j] = elev;
if(elev > me.peak) {
me.peak = elev;
}
}
# Set Altitude Numbers
me.terrain.del();
me.terrain = me.group.createChild("path");
me.terrain
.setColorFill(me.terrain_color)
.moveTo(me.bottom_left.x,me.bottom_left.y + me.terr_offset);
# Draw Terrain
forindex(var k; me.elev_profile) {
me.terrain.lineTo(me.bottom_left.x+(k*(me.max_range_px/(me.elev_pts-1))), me.bottom_left.y -6- me.alt_ceil_px*(me.elev_profile[k]/me.alt_ceil));
}
me.terrain.lineTo(me.bottom_left.x+me.max_range_px,me.bottom_left.y+ me.terr_offset);
me.group.getElementById("text_alt1").setText(sprintf("%5.0f",me.alt_ceil/2));
me.group.getElementById("text_alt2").setText(sprintf("%5.0f",me.alt_ceil));
me.group.getElementById("aircraft_marker").setTranslation(0,me.new_markerPos-me.lastalt);
### Speed Arrow ###
vs_fps = getprop(vert_spd);
if(vs_fps == nil) {
vs_fps = 0;
}
gs_fps = getprop("/velocities/groundspeed-kt")*1.46667; # KTS to FPS
if(gs_fps > 60) {
fpa = math.atan2(vs_fps, gs_fps);
me.group.getElementById("speed_arrow")
.setTranslation(0,me.new_markerPos-me.lastalt)
.setRotation(-fpa)
.show();
} else {
me.group.getElementById("speed_arrow").hide();
}
me.lastalt = me.new_markerPos;
} else {
me.path.hide();
me.text.removeAllChildren();
}
settimer(func me.update(),1);
}, # end of update
get_elevation : func (lat, lon) {
info = geodinfo(lat, lon);
if (info != nil) {var elevation = info[0] * M2FT;}
else {elevation = -1.0; }
return elevation;
}, # end of get_elevation
}; # end of VSD
### START ###
var vsd_stl = setlistener("sim/signals/fdm-initialized", func {
var vsd = vsd.new();
vsd.listen();
print("VSD ... Ok");
removelistener(vsd_stl);
},0,0);
Prerequisites
- Howto: Create a new Nasal module
- Howto: Create a new system in Nasal
- Howto: Create a new instrument in Nasal
- Howto: Terrain sampling in Nasal
- Howto: Processing route manager data in Nasal
- Howto: Working with AI and MP properties
- loopid loops, OOP, trigonometry
ToDo
- add XML markup
- add Nasal snippets (one by one)
- upload omega95's screen shots
- link to geo.nas
External links
- http://www.boeing.com/commercial/aeromagazine/aero_20/vsd.html
- http://www.b737.org.uk/vsd.pps
- http://hoeprr.home.xs4all.nl/DreamHC/Download/B737_VSD_Briefing.pdf
- http://www.smartcockpit.com/data/pdfs/flightops/navigation/Vertical_Situation_Display_For_Improved_Flight_Safety.pdf
- http://human-factors.arc.nasa.gov/publications/Prevot-98-Vertical-Situation-Display-HCI-Aero98.pdf
- http://humanfactors.arc.nasa.gov/publications/Prevot-99-Vertical-Situation-Display-HCI1999.pdf
- http://www.humanfactors.illinois.edu/Reports&PapersPDFs/TechReport/05-10.pdf
References
References
|